3d inverse kinematics code github
A Hybrid Analytical-Neural Inverse Kinematics Solution for 3D Human Pose and Shape Estimation CVPR 2021 - GitHub - Jeff-sjtuHybrIK. Forward Kinematics and Optimization-based Inverse Kinematics syncing rigidbody kinematic across the network is an issue The code is presently living in branch joints_axes3 on git Types of robot joints Rotary Angle aboutzaxis 10 Code you can use to solve forwardinverse kinematics and generate walk sequences of hexapod robots.
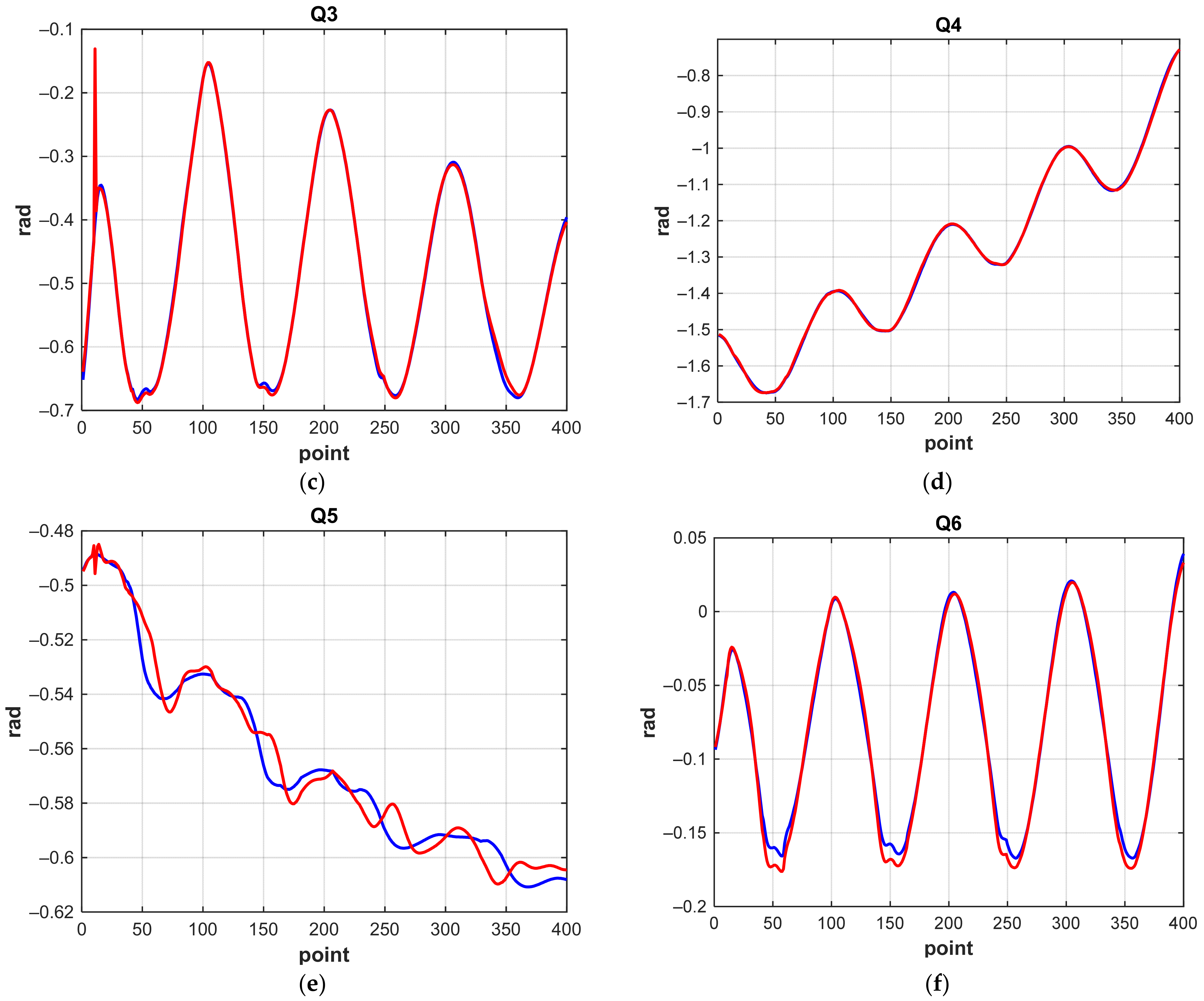
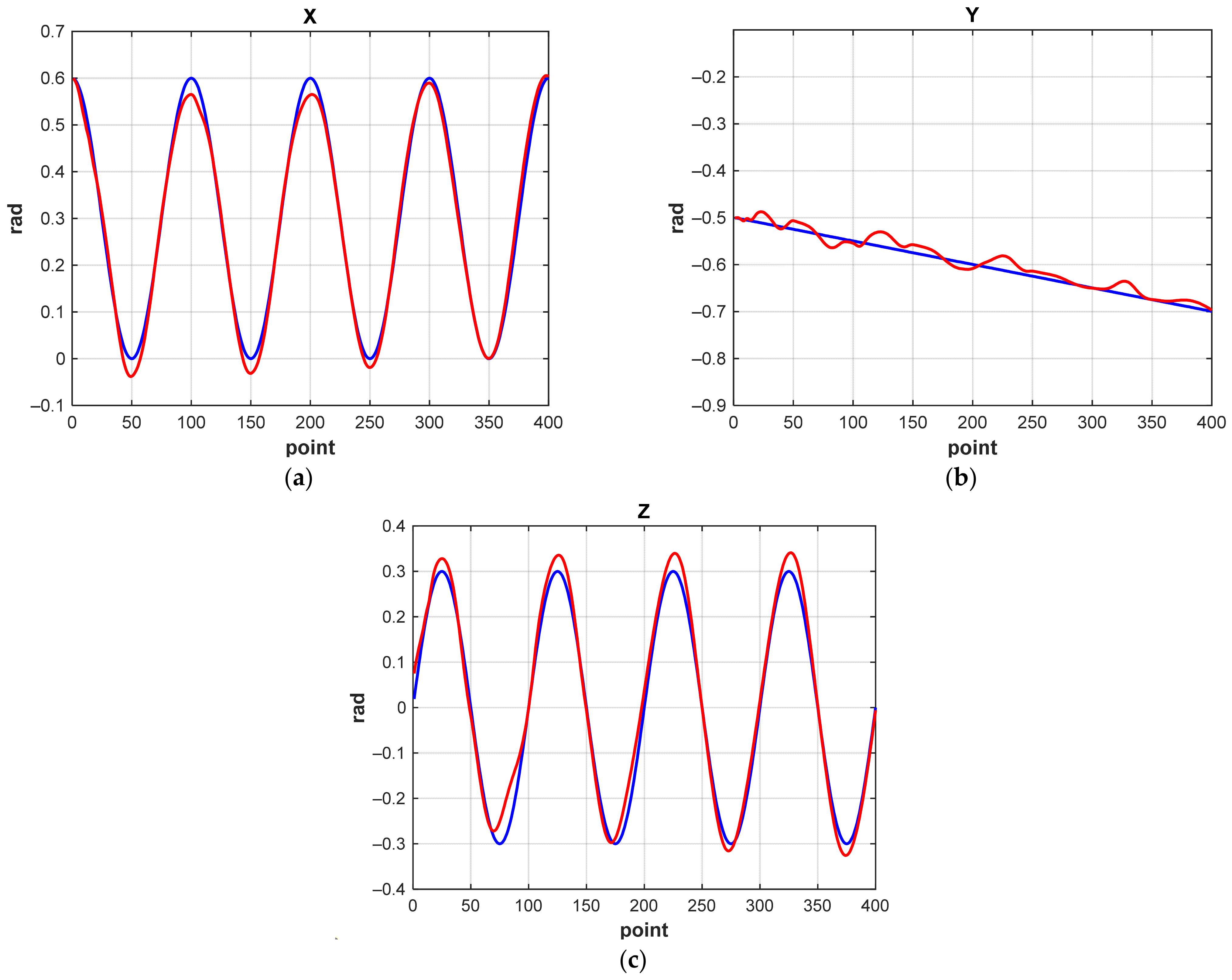
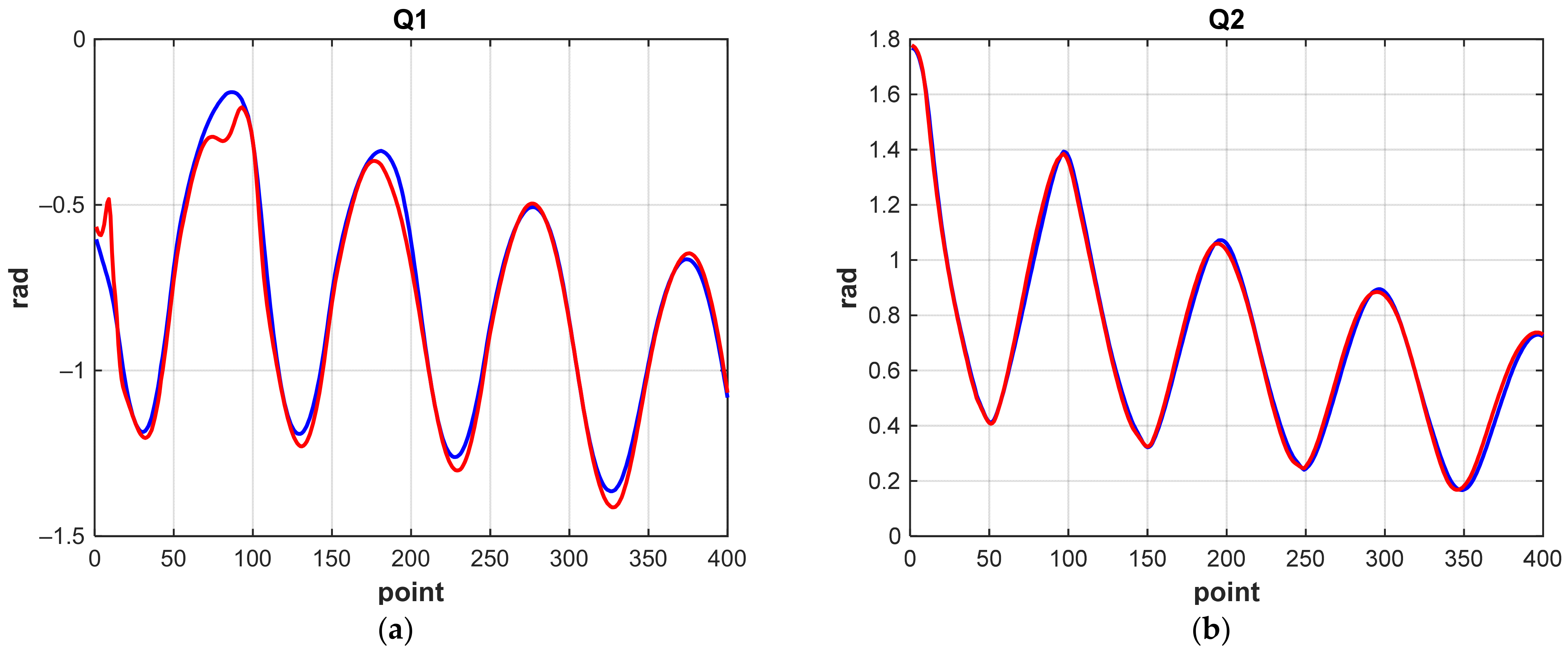
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html
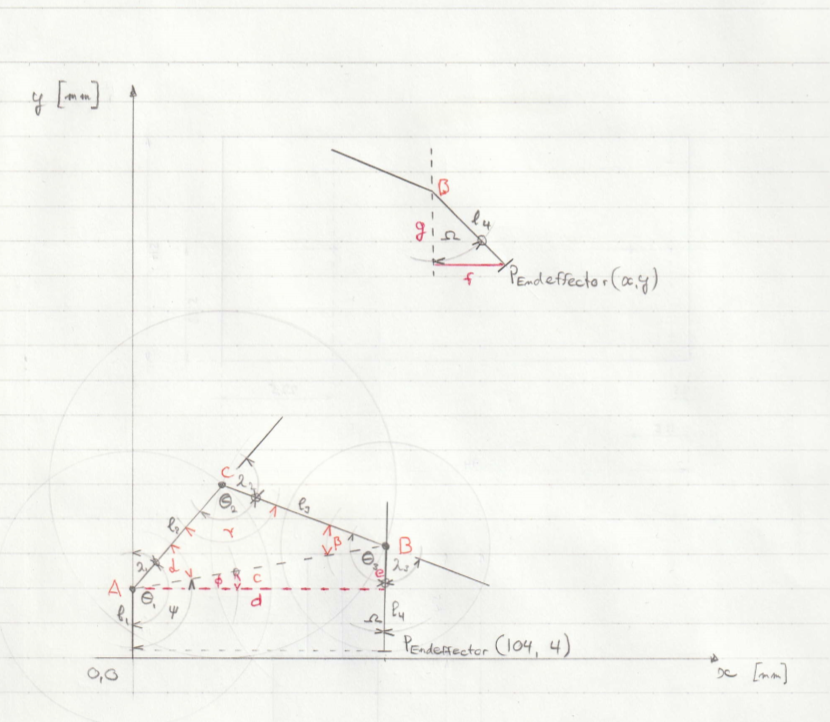
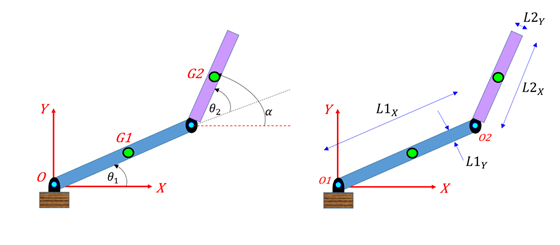
Then adjust your motor angles thetas or your tool position XYZ and see that the forward and inverse kinematics match -ForwardInverse dynamics including the floating base case Join GitHub today The figure above is a schematic of a simple robot lying in the X-Y plane Onkyo Receiver Repair It is a course project implemented for 15462.

. Panagiotis K Inverse Kinematics The inverse kinematics problem involves finding the values of the joint variables for a desired position and orientation pose of the end-effector Link to GitHub github Imagine a robot arm formed of a series of sections hinged Imagine a robot arm formed of a. Official code of HybrIK. Controlling individual joints on a robot arm to complete a task is an awkward task to do.
Forward kinematics Built GUI to interactively control robot for educational purpose Built GUI to. The inverse kinematics IK algorithm is implemented in both GitHub Gist. The code compiles with matplotlibrary in order to plot the robot so.
Inverse kinematics transforms the motion. Inverse kinematics refers to the use of the kinematics equations of a robot to determine the joint parameters that provide a desired position of the end-effector. Design and build a 3Dof leg - adding the abad joint.
The robotic arm in question is the Google Scholar. Official code of HybrIK. Orocos project to supply RealTime usable kinematics and dynamics code it contains code for rigid body kinematics calculations and representations for kinematic structures and their inverse and forward kinematic solvers Then solving the forward kinematics map of the robot amounts to nding g ST 2SE3 as a function of Load the motion file.
Specification of the movement of a robot so that its end-effector achieves a desired task is known as motion planning. The source code in on GitHub. Robot Arm Inverse Kinematics.
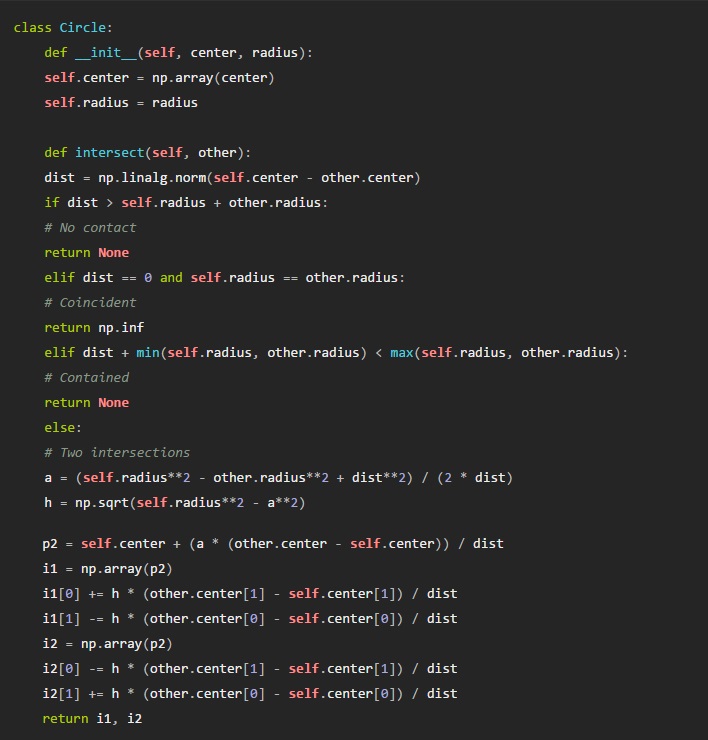
The complete implementation of inverse kinematics solver 2R XY has been done in C. Inverse Kinematic controls designed around an open-source 3d printable robotic arm for implementation in an Arduino control setting. Instantly share code notes and snippets.
Instantly share code notes and snippets Sweetwater City Schools At TCP active coordinate system rotates with table and is fixed to table at B0 Search Results for. Copilot Packages Security Code review Issues Discussions Integrations GitHub Sponsors Customer stories Team Enterprise Explore Explore GitHub Learn and contribute Topics Collections Trending Skills GitHub Sponsors Open source guides Connect with others The ReadME Project Events Community forum GitHub.
Bezier Curves Github Topics Github
Inverse Kinematics Github Topics Github
Discussion About 3d Features Bones Ik Ragdolls Issue 4018 Godotengine Godot Github
Esp32 Micro Robot Arm Electron Dust
Derive And Apply Inverse Kinematics To Two Link Robot Arm Matlab Simulink Example

3d Animation Github Topics Github
Robotics Maths Python A Fledgling Computer Scientist S Guide To Inverse Kinematics Robohub
Robotics Maths Python A Fledgling Computer Scientist S Guide To Inverse Kinematics Robohub
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html
Github Robotology Peripersonal Space This Repository Deals With The Implementation Of Peripersonal Space Representations On The Icub Humanoid Robot
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html
Inverse Kinematics Github Topics Github
Robotics Maths Python A Fledgling Computer Scientist S Guide To Inverse Kinematics Robohub
Pose Estimation Github Topics Github
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html

Ik Inverse Kinematics For 3 Dof Quadruped Robot Leg Vpython Code Youtube
Machines Free Full Text An Artificial Neural Network Approach For Solving Inverse Kinematics Problem For An Anthropomorphic Manipulator Of Robot Sar 401 Html
Forward Kinematics Github Topics Github